Download this page as a Matlab LiveScript
Table of contents
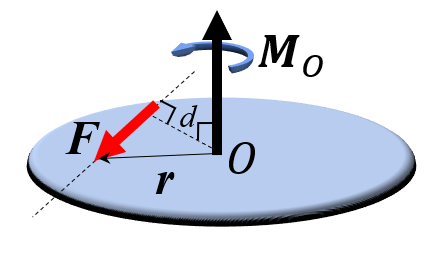
A moment, also known as the torque can be described as a "force to generate a rotation", as it generates an angular acceleration if not in ballance.
A moment has the unit Newton-meter [Nm], it is a vector, and appears around a point as the product of a moment arm (hävarm), , and an applied force, , perpendicular to the moment arm, see the figures below.
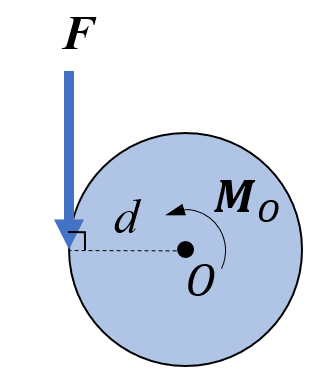
and the scalar counterpart
The moment vector is defined as the vector that is perpendicular to the plan that is spanned by the position vector, and the force vector . The direction of the moment vector is given by the right-hand rule.
is a position vector from the point about which the moment is being calculated to the line along which is acting (action line).
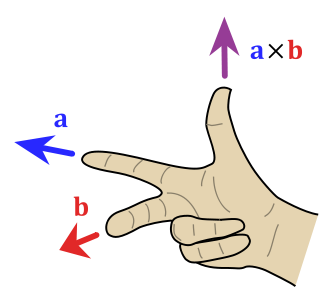
In Matlab we compute the cross product by
syms F_x F_y F_z
syms r_x r_y r_z
F = [F_x F_y F_z].';
r = [r_x r_y r_z].';
M = cross(r,F)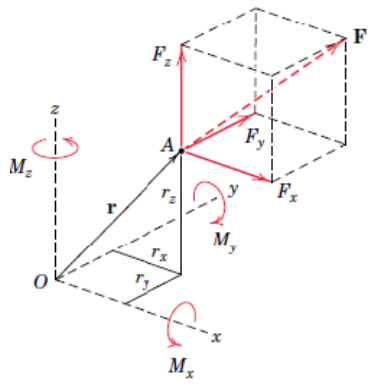
clear
r = [3,0,0];
F = 10*[0,1,0];
Mz = 3*10Mz = 30M = cross(r,F)M = 1x3
0 0 30Note that the component in r can take any value, and the moment around will be the same, this is obvious since the distance does not change.
eF = [4/5, 3/5, 0];
F = 10*eF;
OA = [3,-4,0];
Mz = 5*10Mz = 50M = cross(OA,F)M = 1x3
0 0 50t=2;
r = OA + [4/5,3/5,0]*tr = 1x3
4.6 -2.8 0M = cross(r,F)M = 1x3
0 0 50Here we can vary the parameter to set the point of application to any point along the line of application and the moment around the axis will be unaffected. In fact we can set the parameter to a symbolic variable and we can see that vanishes in the cross product.
syms t
r = OA + [4/5,3/5,0]*t
M = cross(r,F)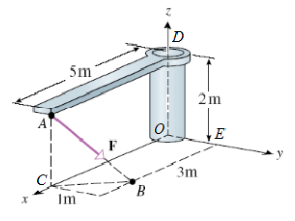
Let in the line AB. Determine the moment O. Determine the moment around the z-axis.
clear
OA = [5,0,2]';
OB = [3,1,0]';
AB = OB-OA;
eAB = AB/norm(AB)eAB = 3x1
-0.6667
0.3333
-0.6667F = 100*eABF = 3x1
-66.6667
33.3333
-66.6667r = OB;
MO = cross(OA,F)MO = 3x1
-66.6667
200.0000
166.6667MO = cross(OB,F)MO = 3x1
-66.6667
200.0000
166.6667MOz = dot(MO,[0,0,1])MOz = 166.6667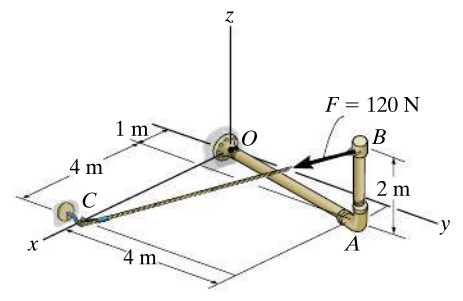
Compute the moment around the OA axis.
OA = [1,4,0].';
OB = [1,4,2].';
OC = [5,0,0].';
BC = OC-OB;
F = 120*BC/norm(BC)F = 3x1
80
-80
-40MO = cross(OB,F)MO = 3x1
0
200
-400MO = cross(OC,F)MO = 3x1
0
200
-400eOA = OA/norm(OA)eOA = 3x1
0.2425
0.9701
0MOA = norm(dot(MO,OA)/dot(OA,OA)*OA)MOA = 194.0285MOA = dot(MO,eOA)MOA = 194.0285